Download PDF (English, Chinese)
Demystifying Intelligent Compaction Part V: Supplement—Tracing the Origins of the “Resonance Theory” (1)
The core premise of the “Resonance Theory” is that a fill body possesses a natural frequency. In the previous article, we examined whether a filled body possesses a natural frequency, and we theoretically clarified that the concept of a natural frequency does not exist in an infinite continuum. So, how did the assertion that a soil mass (in the construction machinery industry, a fill body is generally referred to as a “soil mass,” encompassing both fine-grained and coarse-grained soils; here, “coarse-grained soil” refers to crushed stone of various particle sizes) possesses a natural frequency come about? This article will provide the answer.
1. The Simplified Model of the “Compactor–Soil” System Generates Natural Frequencies
The key to designing a vibratory compactor lies in determining the magnitudes of parameters such as vibratory mass, vibration frequency, excitation force, and vibration amplitude, as well as the relationships among them, to achieve optimal compaction results. This endeavor necessitates an analysis of the interactions occurring between the compactor and the soil mass.
Within the compactor industry, for analytical convenience, the “compactor–soil” vibratory system is typically simplified to a discrete two-degrees-of-freedom model (a classic model in vibration mechanics). This model consists of two distinct components: the vibratory system of the compactor itself (comprising the upper and lower structures and their connecting elements) and the soil mass system that participates in the vibration, as illustrated in Figure 1.
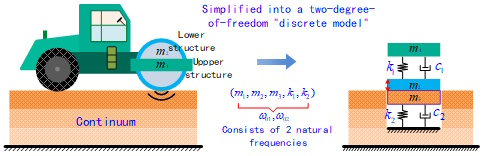
Figure 1: The two-degrees-of-freedom model incorporates two natural frequencies.
Given that the primary function of a compactor is to compact the soil mass, it is hypothesized that a specific portion of the soil (represented by mass m3) also participates in vibration. This soil component is represented in the simplified model as a “mass–spring–damper” system (m3–k2–c2), based on the assumption that the soil mass is coupled with the vibratory drum.
As established in the previous article, a two-degrees-of-freedom system has two natural frequencies: ω_01 denotes the natural frequency between the upper structure (m1) and the lower structure (m2), while ω_02 denotes the natural frequency between the lower structure (the vibratory drum) and the soil mass. (Note: This ω_02 does not represent the natural frequency of the soil mass itself; if one were to determine the natural frequency of the soil mass—assuming such a concept were applicable—an entirely different testing methodology would be required, such as inducing free vibration in the soil mass.) Both natural frequencies have specific mathematical expressions (for details, please refer to any standard textbook on vibration mechanics). At this juncture, the concept of natural frequency emerges, giving rise to the “resonance theory” prevalent in the road roller industry. The core principle of this theory is to synchronize the vibration frequency of the road roller with the natural frequency of the soil mass; by doing so, maximum amplitude is achieved, generating the most intense vibrations and thereby facilitating more effective compaction.
When researching and designing various vehicles, including automobiles and trains, it is standard practice to model the continuous embankment that supports the vehicle’s operation as a discrete, massless “spring-damper” structure. The objective of this simplification is to address how the embankment supports the vehicle (manifesting as resistance). The essence of this simplification lies in replacing the embankment’s actual supporting function with a resistive force (comprising spring and damping forces). This approach presupposes that the embankment has already been fully formed and can be treated as an elastic body condition that accurately reflects the operational environment for automobiles and trains. For general vehicle design purposes, this simplification is entirely adequate and obviates the need to consider the so-called “participating soil mass.”
In the case of road rollers, however, the primary task is to compact loose granular material into an elastic body. This process unfolds through three distinct stages: large plastic deformation, followed by small plastic deformation, and finally, elastic deformation. Crucially, the object of the road roller’s work is a *loose* embankment—a fundamental distinction that sets it apart from automobiles and trains. To account for this unique characteristic, when constructing a “road roller–soil” vibration model, researchers have conventionally posited that a specific portion of the soil mass actively participates in the vibration. This assumption led to the development of a “two-degrees-of-freedom” model, from which it was concluded that the “road roller–soil” system possesses a distinct natural frequency.
2. Problems Associated with the Two-Degrees-of-Freedom Model
The two-degrees-of-freedom model illustrated in Figure 1 has been widely adopted in the design of vibratory road rollers, primarily for simulation analysis. While this model may appear flawless on the surface, the reality is quite different; it suffers from numerous inherent flaws.
With specific reference to the two-degrees-of-freedom model depicted in Figure 1, let us proceed by *assuming*—for the sake of argument—that the model is valid, and then examine the specific problems that arise from this premise (we will enumerate just a few of these issues here).
(1) Uncertainty Regarding the Participating Soil Mass
The parameters associated with the compactor itself (m1, m2, k1, c1) remain constant; however, the parameters of the soil model (m3, k2, c2) are variable. As the degree of compaction increases, the stiffness of the fill material—characterized here by the spring coefficient k2—also increases (this is precisely the parameter that “intelligent compaction” aims to measure). Concurrently, the participating soil mass also increases; however, the exact nature of this variation remains undefined and unclear, and the data currently cited in the literature are largely hypothetical, as illustrated in Figure 2.
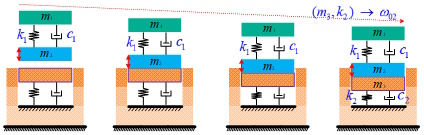
Figure 2: Variation of the “Participating Soil Mass” Model During the Compaction Process
Naturally, throughout the entire compaction process—from start to finish—the soil mass can be conceptualized as a series of distinct models, each characterized by varying parameters (mass, spring coefficient, and damping), as depicted in Figure 2. However, determining the precise values of these parameters is inherently difficult; consequently, the natural frequency of the coupled “compactor-soil” system remains indeterminate. Under these circumstances, how can the compactor’s vibration frequency be effectively tuned to match the soil system’s frequency?
(2) The Inadequacy of Simplifying the Participating Soil Mass
If the participating soil mass is modeled as a standard “mass-spring-damper” system, the soil is effectively replaced by a single lumped mass (m3). This simplification leads to the conclusion that the vibration displacement (amplitude) is uniform across all points within the soil mass, which fundamentally contradicts reality. Once the vibrating drum transmits vibrations to the soil, these waves propagate radially outward; consequently, the vibration amplitudes at different points within the soil mass are not identical.
(3) The Assumption That the Participating Soil Mass Exists in an Elastic State
Simplifying the participating soil mass into a “mass-spring-damper” model presupposes that the soil exists in a purely elastic state. Yet, achieving this elastic state precisely constitutes the ultimate compaction objective that the compactor aims to realize (a key distinction separating this application from that of other types of vehicles). Consequently, when conducting simulation analyses of the compactor under these assumptions, the soil is treated merely as an elastic body; this approach fails to fully capture the dynamic complexities inherent in the actual compaction process. Therefore, the extent to which the various vibration parameters derived from such analyses truly aid in understanding and optimizing the compaction process remains a subject open to debate. In summary, when designing vibratory rollers, it is clearly unreasonable to assume that only a portion of the soil mass participates in the vibration—and then to simplify this interaction into a fixed “mass-spring-damper” model—since this fails to capture the changes in soil properties that occur during compaction. Relying on such a model to determine roller design parameters raises numerous issues; consequently, the development of new, simplified models is warranted.
(To be continued)