Download PDF (English, Chinese)
50 Years of Trials and Tribulations: Part 1 — A Brief Retrospective on the Development of Intelligent Compaction (2)
(3) The 1990s:
As the 1990s unfolded, three distinct development trends emerged. First, several Nordic countries began formulating technical standards for continuous compaction to facilitate the practical implementation of this new technology. Second, research teams in various nations broke free from the constraints of the traditional “compaction meter” principle, adopting mechanical analysis principles to fundamentally re-evaluate Continuous Compaction Control (CCC) technology. (This shift was prompted by numerous issues encountered during the application of compaction meters—most notably, a lack of strong correlation between the Compaction Meter Value [CMV] and results from conventional testing methods, such as modulus measurements. This discrepancy raised doubts about the technology’s actual efficacy and prompted researchers in the field to recognize that continuing along the compaction meter principle would likely cause further complications, necessitating a new approach. Consequently, some researchers began to pivot their thinking, undertaking systematic investigations from the perspective of mechanical theory.) Third, innovations in continuous compaction control technology spurred the development of new-generation road rollers, thereby triggering a revolution in road construction techniques.
• Several European nations began formulating technical standards for continuous compaction control (or incorporating CCC requirements into existing standards), thereby further accelerating the engineering application of this technology. These technical standards included Finland’s “Tielaitos 91”, Sweden’s “BYA 92” and “VÄG 94”, Germany’s “ZTVE-StB-93”, and Austria’s “RVS 8S.02.6”, among others. Notably, the Swedish standard stipulated that the correlation coefficient between continuous monitoring results and traditional testing results need only be *no less than 0.6* (implicitly acknowledging the relatively weak correlation between CMV and conventional test outcomes), whereas the standards in other countries mandated a minimum correlation coefficient of *0.7*.
• A conceptual prototype of an Intelligent Compaction Machine (ICM) made its debut at the 1992 BAUMA trade fair; it was developed by BOMAG.
• In 1993, the German Ministry of Road Construction issued its first recommendation for the use of SCCC (Soil Continuous Compaction Control).
• Rollers equipped with an automatic amplitude adjustment compaction system (Variomatic) were utilized for the first time in the compaction of asphalt pavements (BOMAG, 1996).
• The first scientific research project in China’s highway sector, focused primarily on continuous compaction control—titled “Quality Control Methods for Crushed Stone and Soil Subgrade Construction”—emerged in Heilongjiang Province in 1993, undertaken by Harbin University of Civil Engineering and Architecture (now Harbin Institute of Technology). Based on the dynamic principles governing the interaction between a roller’s steel drum and the elastic medium, the project proposed a dynamic method in 1998 centered on the “subgrade resistance index.” (This index serves as a mechanical parameter bridging the gap toward modulus/stiffness values; it is a critical input for modulus calculation and remains applicable even when the roller is in a “bouncing” state.) In 1999, the project team successfully developed the “Compaction Process Monitoring System (CPMS),” which entered a pilot phase in highway construction projects across China’s three northeastern provinces.
• Researchers in France developed a self-propelled, narrow-wheeled compaction device known as the “Portancemeter”. Designed to simulate the vibratory compaction process, this device enables the determination of the fill material’s spring coefficient (“Kb”)—sometimes referred to as the stiffness coefficient—a key control parameter derived from the theoretical spring model (for details on this derivation, refer to *Introduction to Continuous and Intelligent Compaction Control for High-Speed Railway Subgrades*). A fixed correlation was established in 1998 between the “Kb” values obtained by this device and the modulus (*E*) values derived from static plate load tests, thereby establishing a definitive correspondence between the material modulus and its stiffness coefficient (spring coefficient).
• The German company BOMAG began applying mechanical theories to investigate the dynamic interaction between compaction rollers and fill materials. In 1999, the company proposed using the material modulus as a primary control parameter during compaction, designating this metric as the “Vibratory Modulus” (“Evib”). Concurrently, the Swiss manufacturer AMMANN (a producer of compaction rollers) began adopting the spring coefficient (“Kb”) as its preferred control parameter.
Commentary: This period can be aptly characterized as an era of “a hundred flowers blooming and a hundred schools of thought contending,” wherein both academic research and commercial innovation converged to drive the advancement and deepening application of continuous compaction control technologies. The formulation of technical standards for continuous compaction laid the foundation for its practical application and fundamentally transformed the approach to compaction quality control—shifting from a retrospective, point-based inspection method to a continuous, area-based monitoring of the rolling process. Concurrently, this advancement spurred progress in road construction technology, endowing rollers with a nascent capability for automatic amplitude adjustment—marking the rudimentary beginnings of construction automation. From an academic perspective, the focus shifted from merely analyzing the drum’s vibration response waveforms to a rigorous mechanical analysis of the dynamic interaction between the drum and the fill material. This shift brought to the fore a classic problem in mechanics: determining the solution for the interaction between a rigid cylinder and an elastic half-space. This problem—a subject of elastic mechanics dating back a century—manifests across numerous scientific and engineering disciplines. Regrettably, to this day, this classic mechanical problem remains without a definitive, complete solution; all current solutions rely on various simplifying assumptions. Although these solutions *appear* to be analytical (as they incorporate material properties of the fill, such as its elastic modulus—for details, please refer to the “Intelligent Compaction” volume of this book series), they nonetheless satisfy the precision requirements for compaction quality control—a fact that has been thoroughly validated by engineering practice. From the perspective of intelligent compaction, this constitutes the primary challenge to be addressed during the “sensing” phase—a phase that, of course, also encompasses technical considerations regarding dynamic testing methodologies.
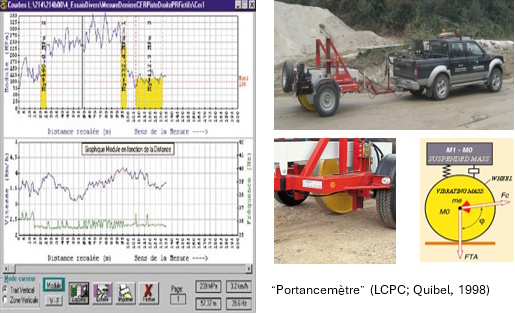
Figure 1: A self-propelled, narrow-wheel compaction device developed in France (the Portancemeter)