Download PDF (English, Chinese)
Insights into Intelligent Compaction (Part 6): Supplementary Notes—Vibratory Compaction Mechanisms and Process Parameters (2)
(Continued from previous section)
2. Mechanism of Vibratory Compaction
Once the characteristics of vibratory compaction force are understood, grasping the mechanism of vibratory compaction becomes straightforward. From a mechanical perspective, one simply needs to keep in mind that “force is the fundamental cause of motion and deformation in an object.” Here, the “force” refers to the vibratory compaction force, and the “object” refers to the fill material (which, during the paving stage, can be described as a granular medium). The mechanism of vibratory compaction can be understood through the following three aspects:
(1) Repeated particle motion creates a fill structure with higher stiffness and greater stability
Complex cyclic loads applied to the fill material induce forced vibrations of varying amplitudes among the internal particles (each particle undergoes complex periodic motion; the amplitude depends primarily on the magnitude of the force and the available free space—a phenomenon absent in static compaction). The interactions between particles become more complex and intense, accelerating the rearrangement of particles in both vertical and horizontal directions. As particles become more tightly interconnected, their resistance to deformation (stiffness) increases—manifesting macroscopically as an increase in resistance and modulus—as shown in Figure 3.
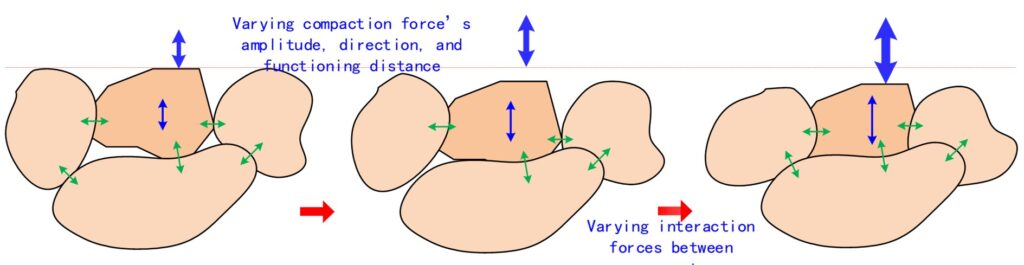
Figure 3: Schematic diagram of inter-particle connections and resistance to deformation
(2) High compaction force creates a fill structure with high stiffness
From the perspective of structural formation, the rolling process involves the applied force (compaction force) continuously breaking down existing, unstable structures to form new, more stable ones (a process where the degree of inter-particle connection shifts from weak to strong, reflecting changes in internal friction). Under the influence of the compaction force, the new structure formed within the fill exhibits higher resistance (and greater stiffness) than the old structure, while the vibratory compaction force itself also increases (a distinction from static compaction force). Provided the particles themselves remain intact, a greater compaction force yields a fill structure with higher stiffness. Upon completion of rolling, the resistance of the fill structure reaches its peak—equaling the compaction force—and its stiffness is maximized (this refers to the maximum value achievable under the specific vibration parameters used; if the stiffness fails to meet the required standard, a combination of stronger vibration parameters or a heavier vibratory roller must be employed). It should be noted that a specific combination of vibration parameters (see the expression for Q in Figure 2) generates a specific vibratory compaction force and compacts the fill material to a specific stiffness value. This is precisely why different combinations of vibration parameters or vibratory rollers of different tonnages must be selected when compacting different types of fill materials.
Matching the vibratory compaction forces to the stiffness (resistance) of the fill material is crucial. If the compaction force is too low, the roller may bounce, and the fill material will fail to reach the specified stiffness; conversely, if the force is excessive, it may damage the fill particles themselves or the structural integrity of the fill mass.
(3) Vibratory compaction force possesses an impact-like nature.
A key characteristic of vibratory compaction is that the steel drum (vibratory drum) undergoes vertical movement (vibration) during the rolling process. Each interaction between the steel drum and the surface being compacted can be viewed as a low-amplitude impact, where the vibration amplitude (displacement) corresponds to the stroke (distance of action). In this sense, vibratory compaction can be regarded as a form of low-intensity impact compaction (the effectiveness of which is well-established), although its force and impact distance are significantly smaller than those of impact rollers.
In summary, understanding the mechanism of vibratory compaction requires starting with the fundamental characteristics of the compaction force and firmly grasping the core principle that “compaction force is the root cause of deformation in the fill material.” Only by doing so can one fully comprehend the essence of compaction and flexibly apply various compaction methods. (To be continued)