Download PDF (English, Chinese)
Insights into Intelligent Compaction (Part 6): Supplementary Notes—Vibratory Compaction Mechanisms and Process Parameters (1)
Previous articles primarily analyzed the “resonance theory” regarding the mechanism of vibratory compaction. Given that the effectiveness of vibratory compaction does not actually rely on the phenomenon of resonance, how then should we understand why vibratory compaction yields significantly better results than static compaction? This article addresses that question and aims to provide insights useful for the design of vibratory road rollers.
As previously mentioned, compaction is the process of applying external force to granular materials to reduce their volume, enhance their mechanical properties (such as stiffness), and form a stable structure. From any perspective, the decisive factor in compaction effectiveness is the applied force and its characteristics.
Applied forces fall into two categories: static and dynamic. Dynamic forces are further subdivided into periodic forces (generated by vibratory compaction) and impact forces (generated by impact compaction). Impact forces can be viewed as a special type of periodic force characterized by low frequency and high amplitude—where “amplitude” refers to the stroke length. While impact forces yield superior compaction results compared to standard periodic forces, they tend to cause unevenness on the compacted surface. The mechanism of vibratory compaction is explained below through a comparison between static compaction force and vibratory compaction force.
1. Characteristics of Vibratory Compaction Force
Vibratory compaction differs from static compaction in at least two key respects: the composition of the compaction force and the way that force is applied.
(1) Composition of Compaction Force
For the sake of comparison, let us assume that the steel drums of both the static and vibratory rollers have an identical mass, M. The static compaction force is expressed as Q = Mg, whereas the vibratory compaction force is expressed as Q = Q (M, m, e, ω, a), as illustrated in Figure 1.
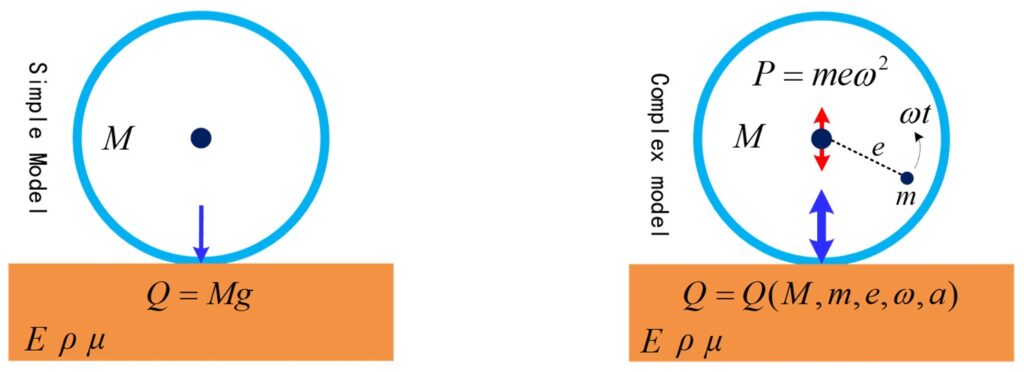
Figure 1: Vibratory Compaction Force vs. Static Compaction Force
The composition of vibratory compaction force is far more complex than that of static compaction force. The rotation of an eccentric mass (m) within the steel drum generates an exciting force (P = meω²); this force drives the drum to undergo reciprocating motion (with the magnitude of this motion defined as amplitude A), thereby generating the compaction force. Its magnitude depends not only on the mechanical configuration of the vibrating drum (steel drum)—specifically parameters such as M, m, e, and ω—but also closely on the strength of the interaction with the fill material (parameter a; for details, refer to the *Intelligent Compaction* volume of this series). This is a dynamic force that constantly changes and is generally much greater than static compaction force.
Furthermore, the frequency components of the vibratory compaction force differ from the excitation frequency itself; they shift as the stiffness of the fill material changes (with the magnitude of the force also varying). This distinguishes it from static compaction force, as illustrated in Figure 2.
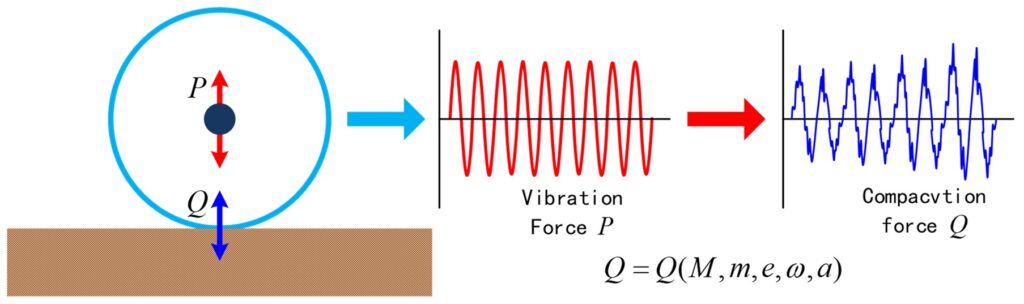
Figure 2: The complexity of vibratory compaction force
Vibratory compaction force is a periodic force containing multiple frequency components (handling this type of force is a challenge when deriving continuum responses and calculating moduli). It can be characterized as a “load spectrum” (as detailed in the author’s books on intelligent compaction) to accommodate the varying movement requirements of particles—a phenomenon particularly evident in asphalt mixtures (the author observed this consistent pattern during asphalt paving and rolling operations on the Changchun-Fuyu Expressway in Jilin Province, China, around 1998–1999).
(2) Mode of action of compaction force
Static compaction operates in a relatively simple manner: it involves a constant downward gravitational force, with the steel drum maintaining continuous contact with the surface being rolled. Since the magnitude of the compaction force is fixed (Q = Mg), the resulting deformation is also fixed. At the start of rolling, the compaction force exceeds the resistance of the granular material (Q > F), causing internal particles to shift downward (displacement occurs). When the generated resistance equals the compaction force (Q = F), this movement ceases; macroscopically, this appears as the cessation of deformation in the fill material. Consequently, a static roller of a specific mass can only achieve a specific level of compaction.
Vibratory compaction force operates through a more complex dynamic mechanism, involving constantly changing magnitude, direction, and effective range. While the steel drum and the surface being rolled move vertically together (and internal particles undergo reciprocating motion of varying amplitudes), intermittent separation occurs, and their amplitudes of motion do not perfectly coincide. The reciprocating motion of the fill particles enhances inter-particle connectivity and results in tighter bonding. Upon completion of compaction—based on the principle that the resistance of the fill mass equals the vibratory compaction force, the resulting stiffness is naturally far greater than that achieved through static compaction (as the vibratory compaction force significantly exceeds the static compaction force).
(To be continued)