Download PDF (English, Chinese)
Demystifying Intelligent Compaction Part 1: Introduction—What Is Intelligent Compaction? (1)
In previous discussions, we covered a great deal regarding intelligent compaction, including its historical evolution and current status. Starting with this issue, we will shift our focus to the technical aspects associated with intelligent compaction. We begin with the “Deconstructing Intelligent Compaction” series, which will primarily cover the fundamental definition and characteristics of intelligent compaction; sensing technologies; key technologies for analysis and decision-making; execution methods; compaction process parameters and automatic adjustment; control systems; and construction automation. To begin, let us discuss what intelligent compaction is and identify its key characteristics.
Intelligent compaction evolved from the foundation of continuous compaction control. From the initial conceptualization (by the U.S. Federal Highway Administration, FHWA) to the subsequent enrichment of its scope (by the International Society for Intelligent Construction, ISIC), this journey spanned approximately 15 years, as illustrated in Figure 1.
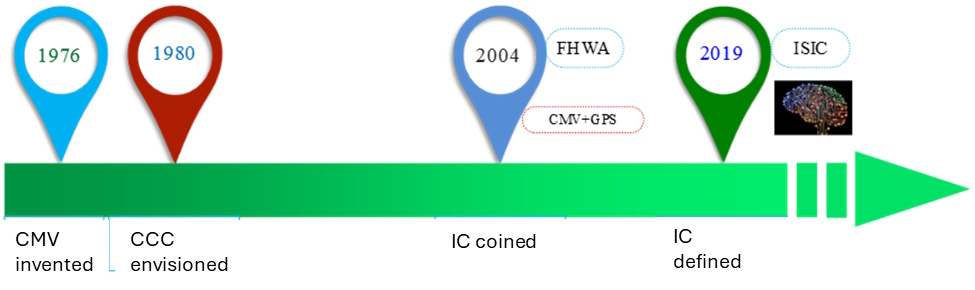
Figure 1: From Continuous Compaction Control to Intelligent Compaction
1. The Connotation and Interpretation of Intelligent Compaction
“Intelligent Compaction” is an abbreviation for “Intelligent Compaction Control.” Although a single, universally accepted definition has yet to be established, its underlying connotation is clear: Intelligent Compaction refers to “the process—conducted during rolling operations—of deriving compaction quality control information based on continuously sensed response signals from the compactor’s vibrating drum; through the autonomous learning of this control information, along with data on the fill material and rolling process parameters, the system achieves autonomous analysis, decision-making, and feedback control regarding compaction quality, thereby enhancing the overall quality of compaction.” (Cited from *Pioneers of Intelligent Construction: Intelligent Compaction*—hereinafter referred to simply as *Intelligent Compaction*). Let us briefly elaborate on the meaning of this passage.
First, the passage encompasses four critical steps (or operational processes): “Sensing,” “Analysis,” “Decision-making,” and “Execution.” These constitute the fundamental characteristics of intelligent compaction—characteristics that are, in fact, essential to the entire field of intelligent construction. Broadly speaking, these four elements represent the fundamental characteristics inherent to the execution of *any* task (though their specific manifestations may vary; for details, please refer to relevant articles published on this official account). The specific content and nature of these four fundamental characteristics ultimately determine the essence and technological sophistication of an intelligent compaction system. For instance, the nature of the information being “sensed” indicates the technology’s maturity: if the sensed information pertains to the modulus or stiffness of the fill layer, the technology is classified as Level 3 (L3). Similarly, the specific *method* of “execution” determines the technological sophistication of the construction process itself. These topics will be explored in greater depth in subsequent articles within this series. Secondly, this passage incorporates the concept of “autonomous learning.” This serves as a concrete manifestation of an AI application, primarily utilized during the “analysis and decision-making” phases. In terms of practical application efficacy, AI is better suited for deployment during the “decision-making” phase—specifically addressing details such as intelligently determining the compactability of fill materials and formulating strategies for adjusting compaction process parameters—thereby enabling the issuance of clear directives to the “execution” phase and facilitating autonomous feedback control.
Finally, the text emphasizes that “improving compaction quality” is the fundamental objective. Regardless of the specific technology employed, the ultimate goal remains singular: to enhance compaction quality and ensure compliance with design specifications. This also serves as the sole criterion for evaluating the efficacy of process control technologies.
Furthermore, it is worth noting that intelligent compaction primarily relies on the roller’s dynamic response; consequently, the roller is a critical component of the intelligent compaction system. (From the perspective of dynamic testing, the rolling process can be conceptualized as a form of “vibratory compaction test,” wherein the roller functions as both the loading apparatus and the primary instrument for the “execution” phase.) In this sense, other detection methods—even if physically mounted on the roller—that do not utilize the roller’s dynamic responses, fall outside the scope of intelligent compaction.
For instance, during the compaction of asphalt pavements, the continuous temperature monitoring performed by thermal infrared sensors mounted on the roller—or the continuous density monitoring conducted via Ground Penetrating Radar (GPR) similarly mounted on the roller (the accuracy of which remains a subject of debate; see subsequent articles for details)—cannot be classified as “intelligent compaction.” These techniques are not essential to the core concept of intelligent compaction; rather, they should be regarded as ancillary technologies, since such mobile detection capabilities can be achieved without physically mounting the equipment on the roller.
Initially, the term “intelligent compaction” carried little connotation of true “intelligence,” amounting to nothing more than a simple combination of a “compaction meter” and GPS technology. When this terminology was introduced in China (circa 2010, when a foreign firm—Company T—coined and promoted the term to market its compaction-monitoring products in China’s high-speed rail construction sector), one of the ISIC founders did not immediately adopt it. Instead, the ISIC founder steadfastly adhered to the designation “Continuous Compaction Control.” (Notably, the term “Continuous Compaction Control” subsequently appeared in China’s first industry-wide construction standard in 2011, as well as in the industry’s product standards issued in 2017.) There are two reasons for this:
First, after careful analysis of the prevailing definition of “intelligent compaction” at the time, it was discovered that it contained very little actual “intelligence”; it was merely a new buzzword.
Second, at that time, China’s BeiDou Navigation Satellite System had not yet gone live. Accepting the concept of “intelligent compaction” would have implied adopting the other GNSS systems. This posed a significant risk regarding the potential leakage of geographic coordinate data for critical Chinese transportation infrastructure —specifically railways, highways, and airports—a security risk that the Chinese government deemed unacceptable.
Consequently, due to the ISIC founder’s insistence, the company in question was compelled to revert the terminology from “intelligent compaction” back to “continuous compaction control.” It was not until 2016 that the author, during a training seminar in Shijiazhuang, discussed this matter with another ISIC founder. Following a mutual agreement, the decision was finally made to rename “continuous compaction control” to “intelligent compaction,” provided that its underlying technical definition and scope were properly refined and substantiated. In 2019, acting on behalf of the ISIC Executive Committee, the authors formally presented the four fundamental characteristics that intelligent compaction ought to possess—along with the specific details of each—at the second International Conference on Intelligent Construction held in Beijing. This event is one of the primary reasons this book is titled *Intelligent Compaction*. To be precise and objective, the concept of intelligent compaction as we define and endorse it corresponds to Level 3 (L3) technology or higher.
2 The Operational Process of Intelligent Compaction
From a construction engineering perspective, the fundamental characteristics of intelligent compaction also define its operational workflow. This process proceeds sequentially through the stages of Perception → Analysis → Decision-making → Execution, implemented via a dedicated control system (see Figure 2).
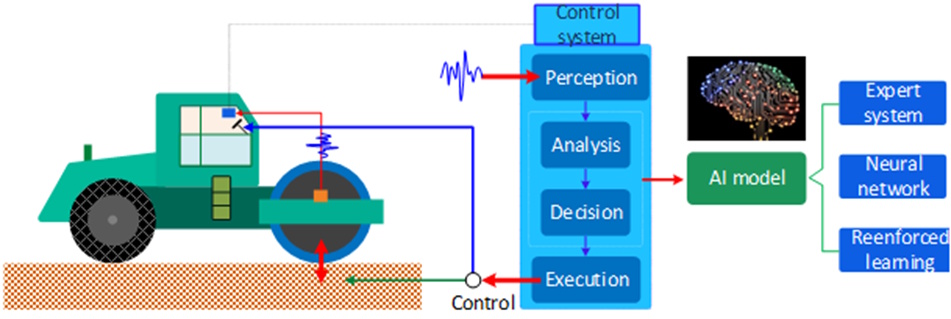
Figure 2: The Operational Process of Intelligent Compaction
(Adapted from *Intelligent Compaction*)
As illustrated in Figure 2, the three stages—from Perception through to Decision-making—are carried out under the unified command of the controller housed in the control system (typically comprising microcomputers or microcontrollers). Currently, these operations require virtually no human intervention (barring exceptional circumstances), thereby achieving full automation. The general workflow is as follows:
The computer directs and controls the data acquisition unit (which functions as a perception terminal and an integral component of the control system—also referred to as an “observer”; for details, please refer to the *Engineering Control Technology* volume within this book series) to perform real-time, automated data collection. Subsequently, based on established standards or criteria, the system analyzes the collected compaction data. Based on the results of this analysis, it formulates a specific rolling plan (or strategy) and issues corresponding execution commands—either to the roller operator or directly to the roller’s mechanical actuators.
All three of the aforementioned processes (or stages) are executed automatically. When the fill material does not fully comply with construction standard requirements—a frequent occurrence, given that the specifications for fill materials in these standards are not entirely quantitative—the data generated during compaction tends to be complex. In such instances, AI models can be employed to process this data (note that the intelligent model illustrated in Figure 2 serves merely as an example, and the actual algorithms utilized in practice are not restricted to this specific instance).
Regarding the execution phase, current practices remain predominantly manual (involving human operators driving the rollers and manually improving the fill material). The control system, in this context, serves merely to issue execution commands. However, driven by technological advancements, automated construction methods using unmanned rollers (construction robots) for autonomous compaction have emerged. In these scenarios, the control system assumes the additional responsibility of regulating the rollers’ compaction—a topic that will be discussed in greater detail later.