Download PDF (English, Chinese)
Analysis of Intelligent Compaction, Part 4: Supplement—A Critical Examination of the “Resonance Theory” in Vibratory Compaction (1)
Vibratory compaction technology matured in the 1960s, giving rise to several explanations regarding the underlying mechanisms of vibratory compaction—explanations that some have termed “theories.” During the 1970s, three specific theories regarding the mechanism of vibratory compaction were widely circulated; in recent years, the so-called “resonance theory” has once again been brought to the fore. Consequently, it is necessary here to re-examine the fundamental concepts and clarify whether the phenomenon of “resonance” actually plays a role in the vibratory rolling process. Such clarification serves as one of the foundational bases for establishing the vibratory process parameters used in the design of vibratory rollers.
1. The Three Theories
Compaction—strictly defined—refers to the process by which an external force is applied to a granular material, resulting in a reduction of its volume, an enhancement of its mechanical properties, and the formation of a stable structural body. This process is also commonly referred to as “rolling” (strictly speaking, the term “compaction” emphasizes the *result* of the process, whereas “rolling” emphasizes the *process* itself—though both are typically translated into English simply as “compaction”).
In the context of vibratory compaction, because the load applied to the fill material consists of periodic dynamic forces, three distinct theories have emerged to explain the underlying mechanism:
- The Resonance Theory — This theory explains the efficacy of compaction primarily from the perspective of resonance. It posits that when the vibration frequency of the dynamic load coincides with the natural frequency of the soil mass being compacted, a resonance phenomenon occurs; at this point, the vibration amplitude reaches its maximum, rendering the vibratory rolling process most effective.
- The Internal Friction Reduction Theory — This theory explains the compaction process primarily through the lens of changes in the internal friction forces within the soil mass. It suggests that when the soil mass is subjected to dynamic loads, the existing internal friction forces are disrupted, thereby reducing the soil’s shear strength. This reduction in shear strength reduces the soil’s resistance to compression, making the soil mass more susceptible to densification under external forces.
- The Repetitive Loading Theory — This theory places primary emphasis on the role of the periodic compressive motion itself. It posits that as the duration of the applied force increases, the soil mass being compacted gradually attains maximum density.
From a dynamic perspective, while these three theories approach the phenomenon of vibratory rolling and formation from different angles, they essentially constitute variations on a single overarching concept—one that can be collectively categorized as the “Dynamic Compaction Theory” (for further details, please refer to subsequent articles). However, the “resonance theory” often cited in this context is not entirely accurate. Therefore, it is necessary to clarify the fundamental concepts of “resonance” from the perspectives of structural dynamics and elastic dynamics.
2. Natural Frequency and the Phenomenon of Resonance
The frequency at which a structure (or system) oscillates during free vibration is termed its *natural frequency* (also known as the *self-oscillation frequency*). This is an intrinsic property of the system, inherent in all structures capable of undergoing vibration.
Natural frequency is a fundamental concept in structural dynamics. Its mathematical expression was originally derived based on a *single-degree-of-freedom* system—specifically, the “mass-spring” model. (For further details, please refer to the volume *One-Dimensional Dynamics and Applications in Engineering* within this book series.)
As illustrated in Figure 1, when a structure is subjected to a periodic external load, if the frequency of the applied load coincides with the structure’s natural frequency (i.e., ω = ω₀—a condition referred to as the *resonance frequency*), the amplitude of the resulting vibration will theoretically tend toward infinity (A → ∞). At this point, the vibration reaches its maximum intensity; this phenomenon is known as *resonance*.
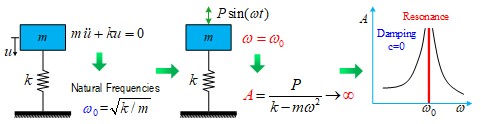
Figure 1: Natural Frequency and the Conditions for Resonance
The dynamic characteristics of a “mass-spring” system are primarily defined by its natural frequency (ω₀), which is collectively determined by the “mass block” and the “spring”—specifically, by the values of *m* (mass) and *k* (stiffness). For two systems possessing identical stiffness coefficients (also known as spring constants), the system with the larger mass will exhibit a lower natural frequency; conversely, if the masses are identical, the system with the higher stiffness coefficient will exhibit a higher natural frequency.
Most real-world structures (such as bridges or buildings) function as *multi-degree-of-freedom* systems and therefore possess multiple natural frequencies. However, when the term “natural frequency” is used in a general context, it typically refers to the *lower-order* natural frequencies, as the higher-order frequencies are significantly more difficult to excite (for instance, it is extremely difficult to induce high-frequency free vibration in a bridge).
Furthermore, because structural systems invariably possess some degree of *damping* (i.e., c ≠ 0), the resulting vibration amplitudes remain finite — albeit potentially very large. Additionally, the actual resonance frequency in such damped systems is slightly lower than the system’s theoretical natural frequency.
The phenomenon of resonance presents both advantages and disadvantages. An example of its beneficial application is the use of vibrating screens to sort granular materials (though, strictly speaking, true resonance is not always a prerequisite for this process; it suffices merely to provide the particles with adequate space for free movement). Conversely, a classic example of the detrimental effects of resonance is the catastrophic collapse of a bridge caused by soldiers marching across it in synchronized step.
3. Natural Frequencies in Structural Systems
In structural mechanics, the objects of study are structural systems of finite geometric dimensions—encompassing both finite discrete bodies (such as structural members) and continuous bodies (such as plates). The dynamic problems associated with these systems primarily revolve around vibration; in this context, the concept of natural (vibration) frequency arises.
For a structural system with fixed mass, the greater its stiffness, the higher its natural frequency; conversely, for identical stiffness, the greater the mass, the lower the natural frequency. For structural systems such as bridges, given their immense mass, their natural frequencies tend not to be particularly high (which explains why bridges have collapsed when soldiers march across them in unison—namely, because the vibration frequency generated by such “synchronized marching” is not particularly high).
For instance, a bridge structural system spanning several hundred meters typically has a natural frequency ranging from approximately 2 Hz to 4 Hz. However, for embankment-type structures—such as roads and railways—do natural frequencies exist? (If they do exist, they would undoubtedly be quite low, given the sheer magnitude of their mass.) The following discussion will focus specifically on this question.

Figure 2: Natural Frequencies of Typical Bridge Structural Systems and Highway Systems